Neural Vision View
Technology description
| The name of the technology: | Neural Vision View |
|---|---|
| Challenge: |
Current methods for detecting grasp points for automated object manipulation in industrial environments often require manual setup and monitoring. Traditional vision systems, on which this technology relies, lack the necessary flexibility and accuracy to operate effectively under complex or variable manufacturing conditions. Industrial automation systems that depend on visual identification of parts face high error rates—up to 30%—when dealing with complicated scenarios. These detection errors can result in robotic arms failing to properly manipulate objects, leading to costly downtime and delays in production processes. The challenges are further exacerbated when objects overlap or when grasp points are inaccessible, increasing the risk of failure and losses. Current technologies are unable to adequately address these challenges, highlighting an urgent need for innovative solutions that enhance the efficiency and reliability of automated object manipulation systems. |
| Description: |
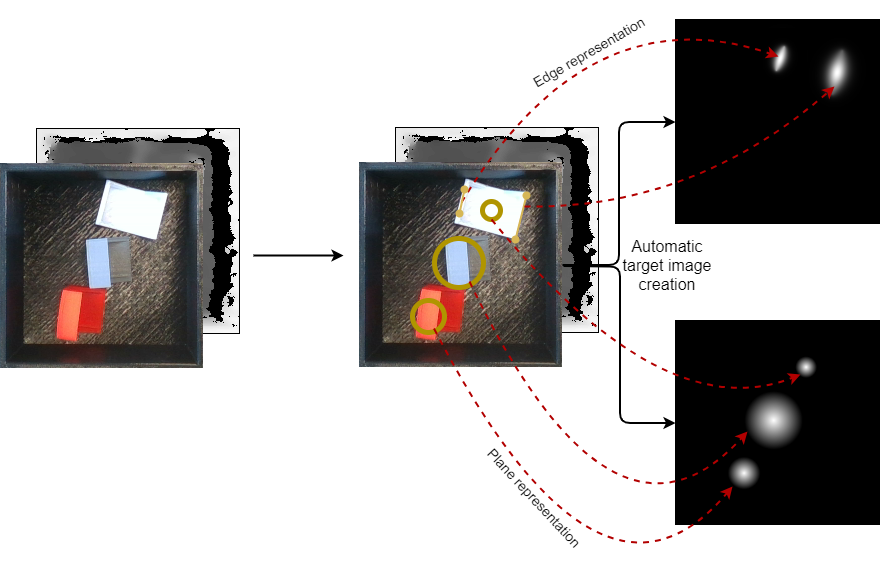
This technology represents a significant advancement in industrial automation. At the core of the innovation is software that transforms scenes containing objects for manipulation into a set of probabilistic maps. These maps effectively capture all relevant scene properties crucial for automatic manipulation. The probabilistic maps provide detailed information on the position and orientation of grasp points, accessibility of the grasp point, its suitability for manipulation, size, and other critical parameters. With these advanced maps, the robotic manipulation system has immediate access to a comprehensive set of data necessary for robust and reliable object handling. This innovative technology is compatible with any industrial RGB or depth cameras and industrial computers, allowing for flexible deployment. It overcomes the limitations of traditional vision systems and manual methods, providing flexibility and precision even in demanding and variable manufacturing conditions, thereby significantly increasing the efficiency and reliability of automated processes. |
| Commercial opportunity: | This technology is designed for robotic system integrators who will implement it for their end customers. It offers a significant increase in the efficiency and reliability of automated manufacturing processes. Integrators can leverage this innovation to overcome the limitations of traditional grasp point detection methods, enabling them to provide advanced solutions for complex and variable manufacturing conditions. This approach opens up new market opportunities and provides a competitive edge in the rapidly evolving industrial automation sector. |
| IP protection status: | know-how SW |
| Development status: |
Phase 3Corresponds with TRL 5 and TRL 6 Technology validation and implementing it in real environment. Testing the technology outside of the laboratory and its adjustment to external conditions.
|
| Partnering strategy: | investment licensing |
| More information: | key words: robotic grasping, grasp point detection, machine vision, bin picking, pick and place, deep learning |
| Images: |
|
| Categories: | Electrical Engineering Artificial Inteligence Software Robotics and cybernetics |
| Institution: | University of Pardubice |
| Owner of a technology: | Univerzita Pardubice |