Neural Vision View
Popis technologie
| Název technologie: | Neural Vision View |
|---|---|
| Motivace: |
Současné metody detekce úchopových bodů pro automatickou manipulaci objektů v průmyslových prostředích často vyžadují manuální nastavování a kontrolu. Tradiční vision systémy, na které se tato technologie spoléhá, postrádají potřebnou flexibilitu a přesnost při práci v složitých nebo proměnlivých výrobních podmínkách. Průmyslové automatizační systémy, které závisí na vizuální identifikaci dílů, se potýkají s vysokou mírou chybovosti – až 30 % – při řešení komplikovaných scénářů. Tyto chyby v detekci úchopových bodů mohou mít za následek, že robotická ramena nejsou schopna správně manipulovat s objekty, což vede k nákladným výpadkům a zpožděním ve výrobních procesech. Problémy se dále zhoršují při překrytí objektů nebo pokud jsou úchopové body nedostupné, což zvyšuje riziko selhání a ztrát. Současné technologie nedokáží tyto výzvy adekvátně řešit, což vyvolává urgentní potřebu inovativních řešení, která by zvýšila efektivitu a spolehlivost automatizovaných systémů manipulace s objekty. |
| Popis: |
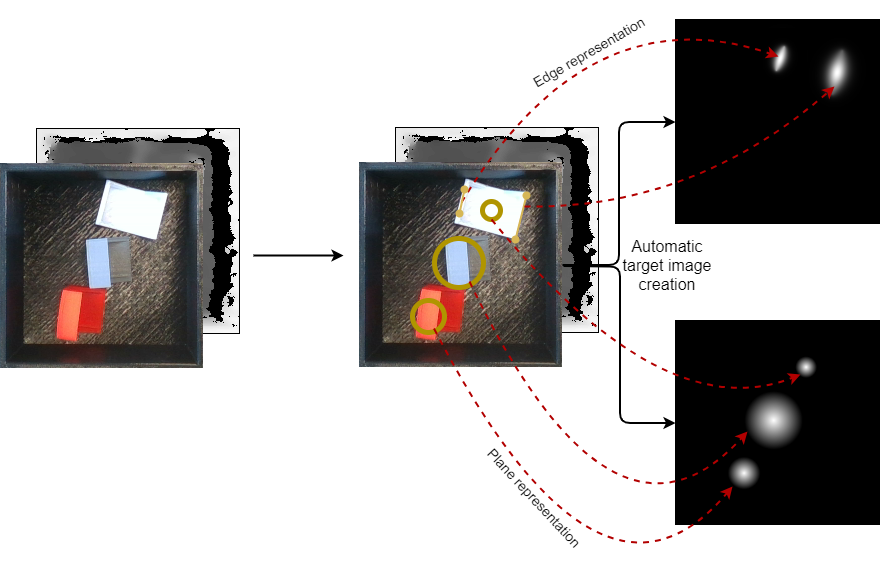
Tato technologie představuje významný pokrok v oblasti průmyslové automatizace. Jádrem inovace je software, který transformuje scénu obsahující objekty k manipulaci do sady pravděpodobnostních map. Tyto mapy účinně zachycují všechny relevantní vlastnosti scény, které jsou klíčové pro automatickou manipulaci. Pravděpodobnostní mapy poskytují detailní informace o pozici a úhlu natočení úchopových bodů, přístupnosti úchopového bodu, jeho vhodnosti pro manipulaci, velikosti a dalších kritických parametrech. Díky těmto pokročilým mapám má systém robotické manipulace okamžitý přístup ke kompletní sadě dat potřebných pro robustní a spolehlivé zacházení s objekty. Tato inovativní technologie je kompatibilní s libovolnými průmyslovými RGB nebo hloubkovými kamerami a průmyslovými počítači, což umožňuje její flexibilní nasazení. Překonává omezení tradičních vision systémů a manuálních metod, poskytuje flexibilitu a přesnost i v náročných a proměnlivých výrobních podmínkách, čímž výrazně zvyšuje efektivitu a spolehlivost automatizovaných procesů. |
| Komerční využití: | Tato technologie je určena pro integrátory robotických systémů, kteří ji budou implementovat u svých koncových zákazníků. Nabízí výrazné zvýšení efektivity a spolehlivosti automatizovaných výrobních procesů. Integrátoři mohou tuto inovaci využít k překonání omezení tradičních metod detekce úchopových bodů, což jim umožní nabídnout zákazníkům pokročilá řešení pro složité a proměnlivé výrobní podmínky. Tento přístup otevírá nové tržní příležitosti a poskytuje konkurenční výhodu v rychle se rozvíjejícím sektoru průmyslové automatizace. |
| Status IP ochrany: | know-how SW |
| Fáze vývoje technologie: |
Fáze 3Odpovídá TRL 5 a TRL 6 Validace technologie a její přenesení do reálného prostředí. Testování technologie mimo laboratoř a její úprava pro externí podmínky.
|
| Strategie pro hledání partnera: | Investice Licencování |
| Další informace: | klíčová slova: robotické uchopování, detekce uchopovacího bodu, strojové vidění, bin picking, pick and place, hluboké učení |
| Ilustrační obrázky: |
|
| Kategorie: | Elektrotechnika Umělá inteligence Software Robotika a kybernetika |
| Instituce: | Univerzita Pardubice |
| Vlastník technologie: | Univerzita Pardubice |